Hexapod Robot (ASHIBOT)
Proyek robot hexapod untuk misi Search & Rescue (SAR) pada ajang Kontes Robot Indonesia (KRI) — Divisi Kontes Robot SAR Indonesia (KRSRI). Fokus sistem: stabilitas gerak di medan tidak rata, integrasi sensor & kamera, serta arsitektur modular untuk teleoperation dan pengembangan autonomous navigation.
About Project
Ringkasan tujuan, konteks kompetisi, dan capaian teknis.
Robot ini dirancang sebagai robot pencari dan penyelamat (Search and Rescue) yang mampu bergerak
stabil di
medan tidak rata dan lingkungan ekstrem. Dengan konfigurasi enam kaki (hexapod), robot memiliki
keunggulan
pada stabilitas, keseimbangan, dan adaptasi medan—cocok untuk simulasi operasi SAR seperti
reruntuhan
bangunan dan area sulit dijangkau.
Sistem mengintegrasikan embedded system dan komputasi berbasis SBC, dengan pembagian tugas
antara pengendali
gerak (aktuator kaki) dan pemrosesan tingkat tinggi (navigasi/persepsi). Arsitektur modular
memudahkan
pengembangan lanjutan seperti teleoperasi, autonomous navigation, dan decision-making
semi-otomatis.
Komponen
Software / Firmware
Catatan: detail sensor/camera bisa ditambah sesuai konfigurasi terbaru.
System Architecture
Pembagian tugas komputasi & kontrol untuk stabilitas dan pengembangan fitur.
High-level (Perception / Navigation)
- Jetson Nano untuk pemrosesan data sensor/kamera
- Computer vision untuk identifikasi objek / kondisi area
- Perencanaan gerak tingkat tinggi (waypoint / mode teleop / semi-auto)
- Monitoring & logging
Tujuan: komputasi berat dipusatkan di SBC agar controller tetap responsif.
Low-level (Motion Control)
- Teensy 4.1 sebagai pengendali real-time
- Gait control & sinkronisasi kaki
- Command servo via Dynamixel (U2D2)
- Proteksi dasar: limit posisi, limit kecepatan, dan penanganan error
Tujuan: gerakan stabil, latency rendah, dan lebih aman saat beban tinggi.
Data Flow (Ringkas)
Jetson Nano (perception / command) → komunikasi (UART/USB) → Teensy 4.1 (gait + kinematics) → U2D2 → Dynamixel AX-12A (aktuator kaki).
Kalau kamu pakai ROS2, bagian Jetson bisa jadi node untuk publish command & subscribe state.
Motion & Control
Konsep gait, stabilitas, dan strategi kontrol yang dipakai.
Gait Strategy
Hexapod mendukung pola gait berbasis phase-shift antar kaki untuk menjaga stabilitas. Pola ini dapat diatur sesuai kebutuhan (misalnya: lebih cepat vs lebih stabil).
- Stabilitas meningkat dengan distribusi tumpuan yang konsisten
- Gerakan lebih halus dengan interpolasi target posisi
- Mendukung pengembangan: turning gait / obstacle aware gait
Control & Safety
Kontrol servo dilakukan dengan batasan parameter untuk mengurangi risiko lonjakan arus dan fault. Ketika terjadi error komunikasi atau overload, sistem dapat menahan perintah / kembali ke state aman.
- Limit posisi & speed untuk menghindari gerakan ekstrem
- Monitoring status servo (opsional jika telemetry aktif)
- Fail-safe sederhana: stop / neutral pose
What I Built (Peran Utama)
Contoh yang bisa kamu sesuaikan: saya mengerjakan integrasi Jetson–Teensy, penyusunan struktur kontrol gerak (gait control), serta debugging stabilitas gerakan dan komunikasi servo melalui U2D2.
Kalau kamu mau, kirim poin peran kamu yang paling akurat, nanti aku buatkan versi “HR-friendly” + versi teknis.
Features & Challenges
Poin pembeda engineer: apa yang dibuat + apa yang sulit + bagaimana diselesaikan.
Key Features
- Modular architecture (high-level vs low-level)
- Teleoperation ready + pengembangan ke semi-autonomous
- Integrasi kamera/sensor untuk misi SAR
- Monitoring & logging (untuk debugging lapangan)
Challenges & Lessons Learned
- Sinkronisasi servo agar tidak terjadi lonjakan arus saat start
- Latency komunikasi (SBC ↔ controller) mempengaruhi respons gait
- Stabilitas gait di permukaan tidak rata (tuning parameter & pose)
- Manajemen error servo dan strategi fail-safe
Specs (Summary)
Ringkasan spesifikasi yang mudah dibaca reviewer.
Hardware
Tambahkan sensor spesifik (IMU, depth camera, lidar, dll) jika sudah final.
Software
Kalau kamu punya repo GitHub, taruh link di bawah.
Gallery
Tambahkan foto PCB/wiring/robot biar terlihat “engineer”.

Robot Overview
Chassis & mechanical layout.
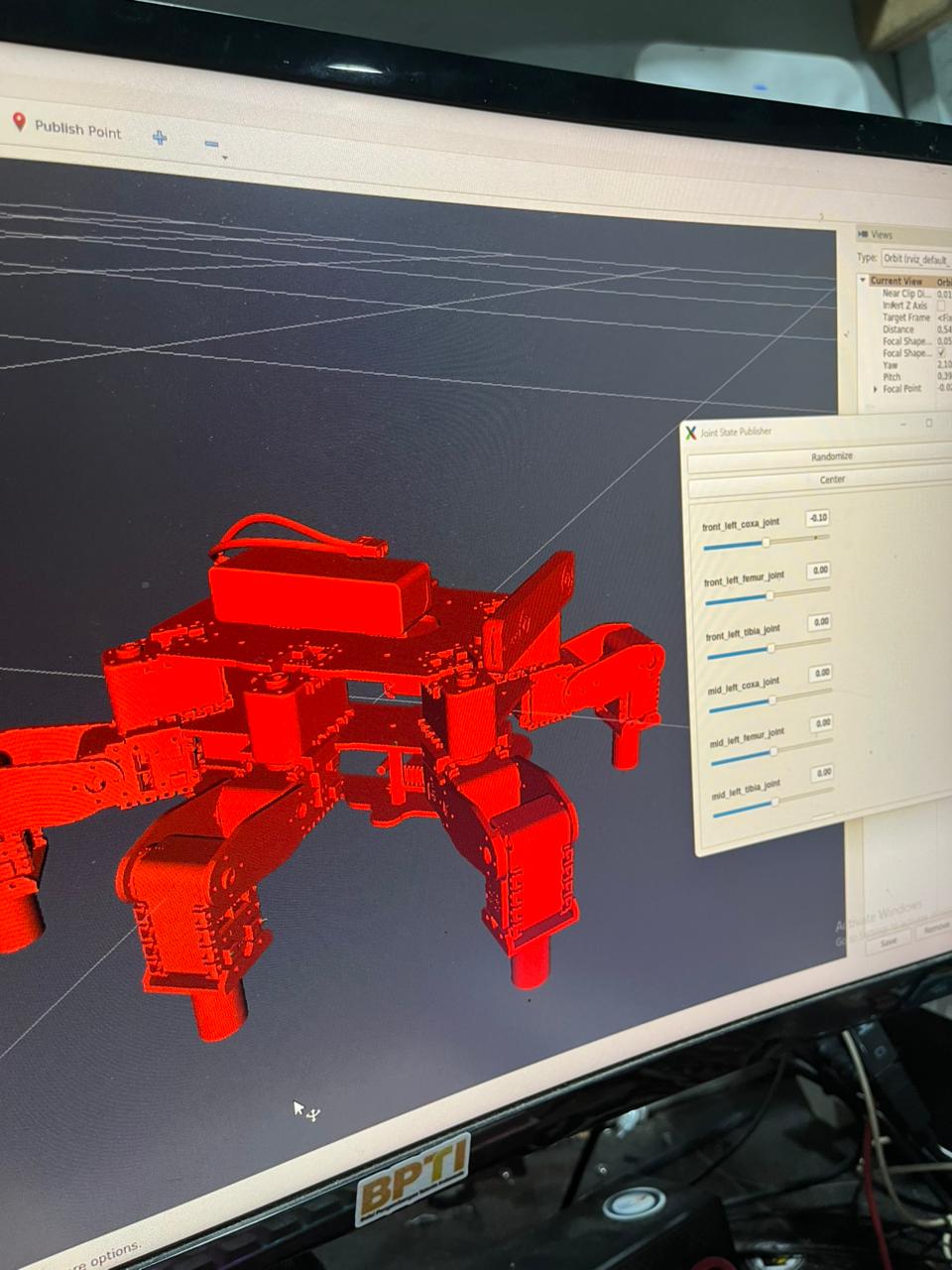
Software Integration
Monitoring / control pipeline.
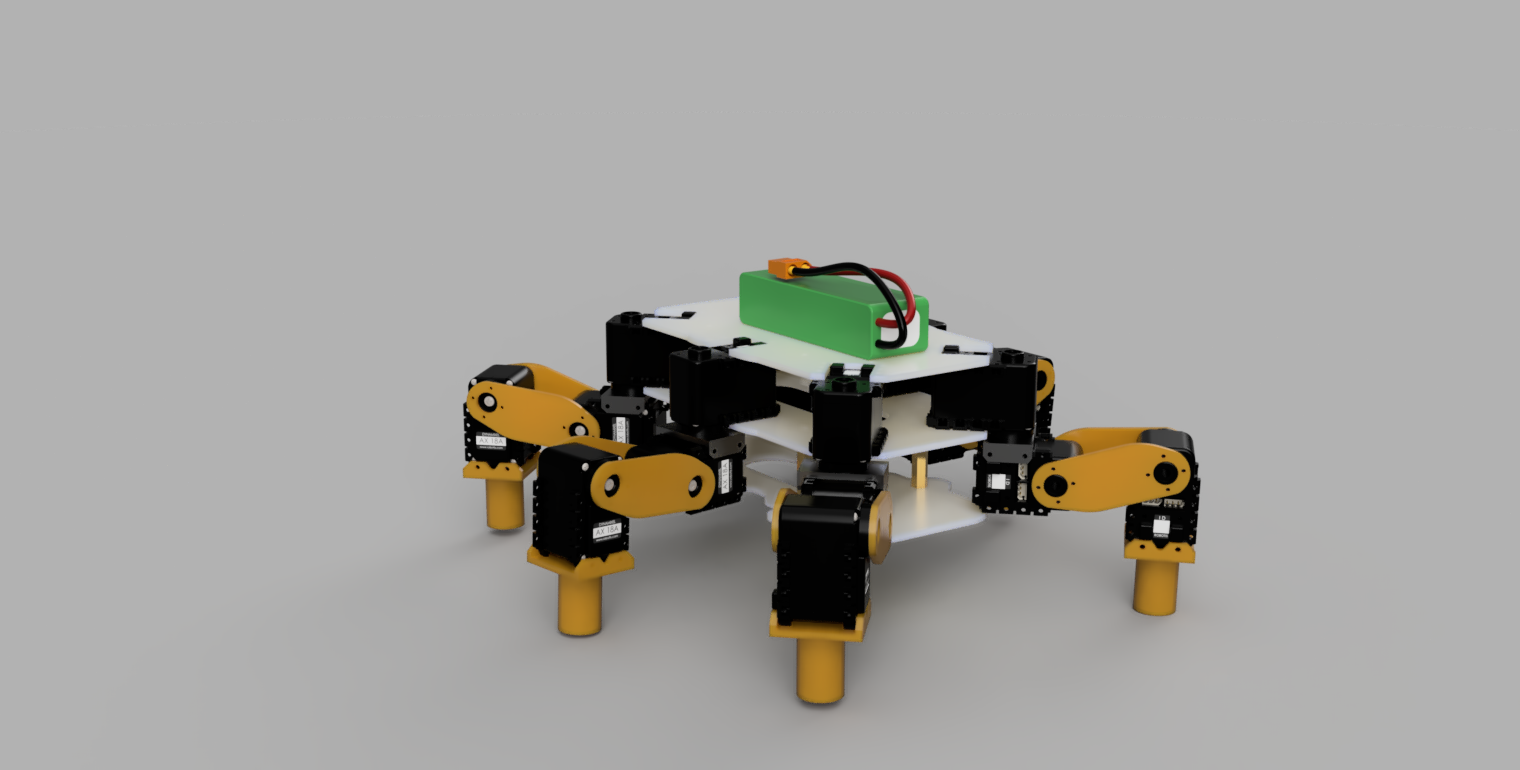
3D Design
CAD view for assembly planning.
Video Documentation
Video test / demo (autoplay muted loop). Ganti source sesuai file kamu.
Ashibot v1.0
Basic gait test (teleoperation).
Ashibot v1.1
Improved stability / tuning (placeholder).
Field Test
Test scenario (placeholder).
Links
Repo: GitHub Repo Demo: YouTube Demo
Isi link repo/demo kalau sudah siap. Kalau belum, boleh dikosongkan dulu.